深海技術設備の開発の現状と展望(その1)
2017年11月30日
李 碩:中国科学院瀋陽自動化研究所
中国科学院瀋陽自動化研究所副所長、水中ロボット研究室主任、研究員。中国科学院の戦略性先導科学技術特定プロジェクト「熱帯西太平洋海洋システムにおける物質・エネルギーの交換とその影響」のプロジェクト「深海設備開発・応用」の責任者を務める。水中ロボットの総体技術や極端環境下の深海技術・設備の開発などの研究・応用事業に主に従事。国家「863」などの関連プロジェクト10件余りを主宰して完成させた。30本余りの学術論文を発表し、多くの発明特許を出願して認可を受けている。
唐 元貴:中国科学院瀋陽自動化研究所
中国科学院瀋陽自動化研究所副研究員、水中ロボット研究室海洋探査部部長。中国科学院の戦略性先導科学技術特定プロジェクト「熱帯西太平洋海洋システムにおける物質・エネルギーの交換とその影響」のプロジェクト「深海設備研発與応用」の管理者を務める。水中ロボットの総体的な最適化技術や新概念水中ロボットARVの研究・応用などの事業に主に従事。国家自然科学基金や中国科学院革新基金などのプロジェクト5件を主宰して完成させた。10本の学術論文を発表し、9件の発明特許を出願して認可を受けている。
黄琰,劉鉄軍,劉健,李彬,張鑫:中国科学院瀋陽自動化研究所
欒振東:中国科学院海洋研究所
王永傑:中国科学院半導体研究所
概要:
半世紀近くの努力を経て、中国の海洋技術設備は急速に進歩し、発展した。とりわけここ数年は、深海技術設備の発展によって、中国の海洋科学の革新に新たな原動力が加わった。中国科学院による戦略的先導科学技術特定プロジェクト「熱帯西太平洋海洋システムにおける物質・エネルギー交換とその影響」は、科学的なニーズをめがけて、世界の最先端を目指し、中国の深海技術設備の発展の現状に立脚し、科学応用目標のはっきりとした深海探査・作業設備の開発に取り組み、自律型観測システムや連続観測作業システム、新型海洋センサー、サンプリング設備を利用して総合的な海洋探査・作業を展開することができるようになった。特定プロジェクト実施から4年間で、深海技術設備は、プロジェクトで定められた科学目標をめがけ、独自の知的財産権を備えた技術設備を形成し、影響力を備えた多くの成果を形成し、海洋科学研究に進んだ技術手段を提供し、中国の深海探査・作業技術の発展を推進し、中国の深海技術設備の発展を先導する重要な役割を果たした。
キーワード:深海技術設備、自律型観測、連続観測・作業、新型海洋観測センサー・サンプリングシステム
海洋科学は海洋技術の発展の根源であり、海洋技術は海洋科学を革新させる原動力である。これまでの歴史を振り返ると、海洋学の革新と海洋資源の新発見はいずれも、海洋の調査・観測の結果であり、海洋科学の革新・研究が海洋観測・探査技術と切り離せないものであることがわかる[1]。中国科学院の戦略性先導科技特定プロジェクト「熱帯西太平洋海洋システムにおける物質・エネルギーの交換とその影響」では、熱帯西太平洋の海洋大気の相互作用や中国近海に対する黒潮の影響などの一連の海洋科学問題をターゲットとして、「深海探査設備開発・応用」プロジェクトが設立された。研究目標としては、世界の最先端を目指し、世界先端の水準と能力を備えた一連の海洋技術・設備を独自に開発し、海洋科学研究に必要な自律型観測システムや連続観測・作業システム、新型センサー、探査・サンプリング設備などを特定プロジェクトに提供し、海洋科学問題の解決と海洋現象の科学分析に技術手段を提供し、独自の知的財産権を持った設備を形成し、中国の深海探査・作業技術の発展を推進することが掲げられた[2]。
1 プロジェクト研究内容
特定プロジェクトの科学的な必要性をターゲットとして、同プロジェクトでは主に、3種類の海洋技術設備の開発・応用事業が展開された。
1.1 自律型観測システム
自律型観測システムは、母船から投入された後、母船を離れて作業を行い、比較的長期ににわたり連続的な海洋自律移動観測プラットフォームを主に使用し、海洋科学調査における高時空分解能のその場観測データや敏感地域での自律観測の実際のニーズを満たしている。これには主に、300m/1000m水中グライダー自律観測システム、1000m級長期定点断面観測型自律型無人潜水機(AUV)、4500m級深海熱水探査AUVなどのシステムが含まれる。
水中グライダーは、浮遊ブイ・水中ブイ技術と水中ロボット技術を結合した新型の海洋環境水中観測プラットフォームである[3]。これは自身の浮力の調整を通じて駆動力を提供し、水平翼の揚力によって垂直運動を水平運動に転換し、同時に、内蔵された姿勢制御装置と進路制御装置を通じてその姿勢角と進路角を制御し、連続制御可能なグライダー運動を実現し、高時空分解能のその場観測データや敏感地域での自律観測に対する特定プロジェクトのニーズを満たすものである。水中グライダー自律観測システムは、複数の水中グライダーを利用して、自律観測任務を協同で遂行する。
長期定点断面観測型AUVは、自己推進式と垂直断面運動を結合した新型の自律連続観測システムで、高精度な双方向の浮力調節技術を通じて、最も優れた水平航行と垂直断面運動を実現し、搭載されたセンサーによって、30日を超える海流や溶存酸素、濁度、葉緑素、温度・塩分濃度・深度などの海洋要素の長期断面データ情報を獲得し、黒潮が通る敏感海域の長期的な定点連続観測のニーズを満たすことができる[4]。
深海熱水探査AUVシステムは、微地形測定や海底撮影、熱水異常探査などのセンサーを統合した4500m級AUVシステムであり、複雑な海底付近環境での自律航行を行い、深海熱水活動エリアと冷湧水域の精密な音波探査と海底近くの光学観測の必要性を満たすことができる。
1.2 海洋連続観測・作業システム
海洋連続観測・作業システムは、主に母船を拠り所として作業を展開し、海洋物質やエネルギー、熱量などの輸送過程の研究の差し迫ったニーズを主に解決する連続観測システムであり、西太平洋及び中国近海の海洋循環力学の研究を促進している。これには主に、500m船上搭載曳航式光ファイバー温度・深度断面連続観測システム、3000m深海生態プロセス長期定点観測システム、6000m級深海科学調査型遠隔操作無人探査機(ROV)システムなどが含まれる。
船上搭載曳航式光ファイバー温度・深度断面連続測定システムは、高密度・高効率の船上搭載曳航式測定設備であり、時間・空間上の連続測定というシステムの強みを十分に生かし、海洋調査と科学研究に新たな観測技術手段を提供し、高時空密度の温度・深度データのすばやく効率的な取得を可能とした[5]。
深海生態プロセス長期定点観測システムは、一種のフレーム式水中固定観測プラットフォームであり、科学的な必要に応じて異なるセンサーを選んで搭載し、海底で長期にわたって連続的な定点観測をすることができる。またROVを通じて観測の具体的な位置を調整し、一年を超えるマルチセンサーの同時定点精密観測データを得て、深海生態系の形成と変化のメカニズムや生物の生長サイクルと代謝リズム、個体群の季節に応じた変化などの海洋現象を研究することができる。
深海科学調査型ROVシステムとなるのが、中国の自主開発している科学調査向けの6000m級ROV設備である。全電動の推進技術を採用し、プラットフォームの騒音を引き下げ、環境に対する影響を減少させた。光ファイバー通信技術を採用して映像とデータをリアルタイムで伝送し、先進的な照明・撮影設備を使用し、水中で放送品質のハイビジョン映像の撮影を行うことができる。高精度のナビゲーション・位置決めシステムを備え、水中で多自由度の高精度制御を実現できる。豊富なデバイスインターフェイスを備え、各種の科学調査機器設備を搭載することができる。細かい動きの可能なロボットアーム2基が取り付けられ、海底近くでのサンプリング作業を行うことができる。
1.3 新型海洋観測の一連のセンサーとサンプリングシステム
新型海洋観測の一連のセンサーとサンプリングシステムは、母船または水中プラットフォームを拠り所として作業を行い、深海生物・生態環境の探査技術・センサーや深海熱水探査技術・センサーの開発を通じて、深海環境にまだ有効なセンサーとシステムの探査技術がないという問題を解決し、地域の深海の観測・探査能力を高め、深海の生物地球化学的循環の科学研究の発展を促進するものである。これには主に、深海ROVプラットフォームに基づく4500m級ラマンスペクトルその場定量探査システム、3000m/6000m深水可視化・可制御軽量型堆積物柱状サンプリングシステム、3000mハイスループット深海海水サンプリング・分級濾過システム、4500m級深海極端環境高精度サーミスタチェーンなどが含まれる。
深海ROVプラットフォームに基づくラマンスペクトルその場定量探査システムが採用しているラマンスペクトルは、非接触や非破壊、多成分の同時探査などの長所を備えている。ラマンスペクトル技術に基づいて開発されたRiPシステムはとりわけ深海熱水噴出孔や海底冷湧水などの極端環境下でのその場物質成分の探査・分析に適している[6,7]。
深水可視化・可制御軽量型堆積物柱状サンプリングシステムは、往復式空圧タンピングのキー技術と結びつけ、直立式サンプリングシステムによる展開・格納操作を採用し、リアルタイムの制御・モニタリングや水中位置決めなどの機能を増やし、深水の総合的な柱状堆積物の採取に用いることができる。
ハイスループット深海海水サンプリング・分級濾過システムは、その場濾過を採用してサンプルを採取する深海サンプリング方法であり、深海浮遊顆粒物の研究に簡便で有効なサンプリング技術手段を提供するもので、採水器を使用して採水し、船上の実験室に引き上げて濾過してサンプルを取得する従来の作業モデルを改変した[9]。
深海極端環境高精度サーミスタチェーンは、深海極端環境下での熱水口の温度や冷湧水域の温度の精確な勾配測定を行い、深海の熱量の輸送過程を研究するものである。
2 プロジェクトの進展
4年にわたる研究を経て、3種類の深海技術設備は、設計や加工、製造、デバッグ、湖や海での試験などの開発段階を経過し、主要技術指標の要求に全面的に到達した。科学問題をターゲットに定めて、一部の技術設備はすでに、海上での試験や調査航海での応用で重要な役割を果たし、顕著な科学研究成果を上げている。
2.1 海洋科学研究に向けた中国の自律型観測システム技術体系を初期的に構築
海洋科学研究に向けた一連の自律型観測システムを開発し、海洋科学研究に向けた中国の自律型観測システム技術体系を構築し、水深1000mまでの海洋環境長期連続観測能力と水深4500mまでの海底付近の精密探査能力を形成した。海洋環境での連続観測時間は1カ月、航続距離は1000kmを超え、長期的で広範囲の海洋観測に技術的な土台を築き、国内で真っ先に大深度AUVを利用し、海底付近での音波・光学精密探査を行い、冷湧水の研究活動を展開した。
2.1.1 水中グライダー自律観測システム
中国科学院瀋陽自動化研究所が中心となって現在開発している水中グライダー「海翼」は300mと1000mの2シリーズからなり、科学の目標をターゲットとし、水中グライダー技術の成熟度を高め、中国の水中グライダーを実際の観測応用段階へと進めるのをリードしている。水中グライダーの水面における通信稼動状態と中規模渦の観測経路を図1に示した。
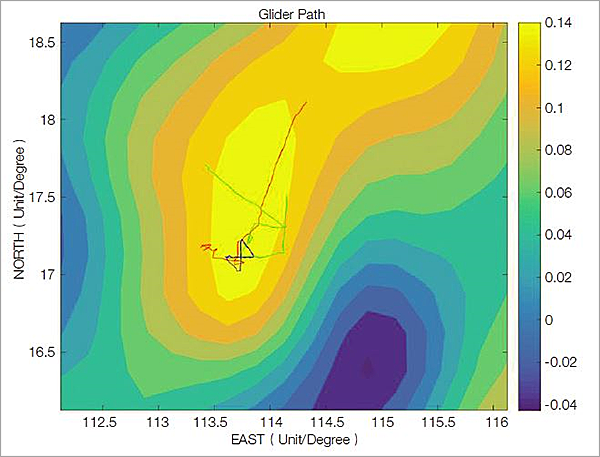

図1 水中グライダーの水面における通信状態と中規模渦の観測経路
2014年10月、「海翼」水中グライダーは、南中国海での1カ月余りにわたる海上試験を終えた。長距離航続試験においては、水中グライダーは、55km×55kmの区域内を連続航行し、航続距離は1000kmを突破して1022.5kmに達し、229件の1000m深断面観測データを獲得した。これは中国の水中グライダーにとって初の連続観測航続距離1000km超えであり、連続観測時間は30日に達した。実験データの処理からは、本試験の区域で2回、海洋の表層混合層が冷たくなるという現象が発生したことがわかった。水中グライダーの高精度データは混合層冷却の原因の定量的な分析を強力に支えるものとなった。
2016年7月、3台の水中グライダーが南中国海の西沙群島の東の海域で中規模渦の観測実験を展開した。リモートセンシング衛星データと漂流ブイデータと組み合わせ、複数の観測戦略を利用して、西沙群島東側の直径100kmの中規模区域に対し、15日間にわたる連続観測を行った。中国で初めて、3台の水中グライダーを使用して、海上の動態目標に対するマルチパラメーターの連続観測を行った。3台の水中グライダーの累計航続距離は1033kmに達し、316件の1000m級の潜水断面の取得に成功し、衛星リモートセンシングデータと結合した動態目標の追跡というオンライン制御戦略の実証に成功し、水中グライダーのネットワーク化観測応用に技術的な基礎を築いた。
2.1.2 長期定点断面観測型AUVシステム
長期定点断面観測型AUVシステム(以下「探索1000」)は、特定プロジェクトの提出した科学問題に基づいて瀋陽自動化研究所が開発した新たな技術設備であり、自律型無人潜水機と水中グライダーの技術と十分に結びつけ、高精度と双方向の大深度浮力調節や長時間マルチモデル制御などのキー技術でのブレークスルーを実現した。「探索1000」は、自律航行や無動力潜水、モニタリングスリープなどの稼動モードを備えており、同類の機器では国内で最初のもので、世界の先端水準に達している。「探索1000」AUVは図2に示した。
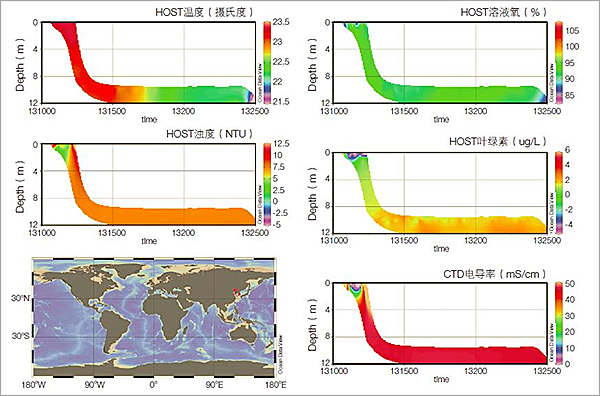

図2 「探索1000AUV」とその観測データ
「探索1000」は2015年10月、大連ショウ子島海域で25日間にわたる海上試験を順調に完了し11回の水中航行試験を行い、累計運行時間は100hを超え、累計航続距離は400kmを超えた。一回のミッションの最大連続稼動時間は94h、最大航続距離は364km、連続観測断面は25回で、ショウ子島海域の30hの海流と温度・塩度・深度、葉緑素、溶存酸素などの連続断面観測データを取得し、同区域の半日周潮現象を検証した。
2016年6月初め、「探索1000」は南中国海で20日間にわたる大深度海上試験を順調に完了した。海上での投入と回収の操作の実用性を実証し、5級以上の海况における安全回収作業を順調に完了し、システムの自律航行と潜水機能の深海作業における信頼性を検証し、最大潜水断面は700mに達した。総合試験では、「探索1000」は水中で連続7日間にわたって作業し、航続距離は500kmを超え、43件の潜水断面の観測を連続で完成し、最大作業水深は800mを超え、世界の先端水準に到達した。
2.1.3 深海熱水探査AUVシステム
深海熱水探査AUVシステム(以下「探索4500」)は、瀋陽自動化研究所と海洋研究所が共同開発した、微地形測定や海底撮影、熱水異常探査などのセンサーを統合した4500m級AUVシステムである(図3)。研究開発の過程では、融合超短基線位置決め情報を融合した組み合わせナビゲーション技術でのブレークスルーを中国で真っ先に実現し、独自の知的財産権を備えた組み合わせナビゲーション・データ処理ソフトウェアを開発し、作業効率と広範囲探査能力を高めた。前方ソナーの情報に基づく自律衝突防止技術でのブレークスルーを実現し、複雑環境に適応する能力を高め、海底付近での航行の安全を確保した。


図3 深海熱水探査AUVシステムとその撮影した海底画像
試験中のシステムは、超短位置決めを位置決め標準とし、独自に開発したナビゲーションとPHINSナビゲーションとの東方向の誤差と北方向の誤差の時間経過に従った誤差曲線図を作成した。PHINSの東方向の誤差と北方向の誤差は時間の経過に応じた変化曲線を描き、PHINSの位置の東方向の誤差の最大値は50m、北方向の誤差の最大値は70mだった。独自に開発したナビゲーションの位置の東方向の誤差と北方向の誤差はいずれも20m以内で、超短基線位置決め精度にほぼ相当した。高精度なナビゲーションと位置決めデータは、海底付近での探査に強力な技術の支えを提供した。
「探索4500」は2016年7月22日、16日間にわたる海上試験と冷湧水域での試験的な応用を順調に完了した。8回にわたって連続潜水し、超短基線位置決めモデルを使用した探査作業を中国の深海AUV上で初めて成功させ、大面積冷湧水域での精密地形・地貌図と数千枚の海底ハイビジョン撮影画像を取得した。中国の深海AUVはこれによって初めて、冷湧水域での精密な地形・地貌・底質探査や海底付近の撮影、理化学的環境マルチパラメーター探査を行い、大量の科学調査データを獲得した。
(その2へつづく)
参考文献:
[1]. 李靖宇. 以海洋強国為取向推進国家重大戦略工程. 区域経済評論, 2014, (04): 104-108.
[2]. 銭洪宝・兪建成・韓鵬ら. 我国大型深潜装備研発管理存在的問題及対策思考. 高技術通訊, 2016, 26(2): 200-206.
[3]. 兪建成・劉世傑・金文明ら. 深海滑翔機技術與応用現状. 工程研究-跨学科視野中的工程, 2016, 8(2): 208-216.
[4]. Jiang Z B, Liu T J, Xu H X, et al. Multivariable decoupling control based on TC control in the diving and floating process of AUV. Applied Mechanics and Materials, 2015, 741: 720-724.
[5]. Zhang D P, Wang J, Wang Y J, et al. A fast response temperature sensor based on fiber bragg grating. Measurement Science and Technology, 2014, 25(7): 1-4.
[6]. Tian Z, Zhang X, Liu C, et al. Feasibility study on quantitive analysis of sulfide concentration and pH of ocean sediment pore water via Raman spectroscopy. Spectroscopy and Spectral Analysis, 2015, 35(03): 649-656.
[7]. 田陟賢・張鑫・劉昌齢ら. 孔隙水中硫酸根和甲烷的拉曼定量分析可行性研究. 環境科学與技術, 2014, 37(7): 162-166.
[9]. Chen Y H, Xu Y P, Ni Z T, et al. Design and development of a drifting buoy for gathering environmental data. Advanced Materials Research, 2014, 3(1):417-421.
※本稿は李碩,唐元貴,黄琰,劉鉄軍,劉健,李彬,張鑫,欒振東,王永傑「深海技術装備研制現状与展望」(『中国科学院院刊』2016年第31卷第12期、pp.1316-1325)を『中国科学院院刊』編集部の許可を得て日本語訳・転載したものである。記事提供:同方知網(北京)技術有限公司