深海技術設備の開発の現状と展望(その2)
2017年11月30日
李 碩:中国科学院瀋陽自動化研究所
中国科学院瀋陽自動化研究所副所長、水中ロボット研究室主任、研究員。中国科学院の戦略性先導科学技術特定プロジェクト「熱帯西太平洋海洋システムにおける物質/エネルギーの交換とその影響」の プロジェクト「深海設備開発/応用」の責任者を務める。水中ロボットの総体技術や極端環境下の深海技術/設備の開発などの研究/応用事業に主に従事。国家「863」な どの関連プロジェクト10件余りを主宰して完成させた。30本余りの学術論文を発表し、多くの発明特許を出願して認可を受けている。
唐 元貴:中国科学院瀋陽自動化研究所
中国科学院瀋陽自動化研究所副研究員、水中ロボット研究室海洋探査部部長。中国科学院の戦略性先導科学技術特定プロジェクト「熱帯西太平洋海洋システムにおける物質/エネルギーの交換とその影響」の プロジェクト「深海設備研発與応用」の管理者を務める。水中ロボットの総体的な最適化技術や新概念水中ロボットARVの研究/応用などの事業に主に従事。国 家自然科学基金や中国科学院革新基金などのプロジェクト5件を主宰して完成させた。10本の学術論文を発表し、9件の発明特許を出願して認可を受けている。
黄琰,劉鉄軍,劉健,李彬,張鑫:中国科学院瀋陽自動化研究所
欒振東:中国科学院海洋研究所
王永傑:中国科学院半導体研究所
( その1よりつづき)
2.2 中国最先端の海洋連続観測/作業システムを初期的に構築
広範囲連続観測や海底定点長期観測、大深度作業のための船上搭載システムを研究開発し、海洋連続観測と大深度作業の能力を形成し、中国最先端の海洋連続観測/作業システムを構築し、海 上試験と調査航海での応用を展開した。
2.2.1 船上搭載曳航式光ファイバー温度/深度断面連続測定システム
船上搭載曳航式光ファイバー温度/深度断面連続測定システムは、中国科学院半導体研究所が研究開発したもので、任意の長さの接続や加重チェイニング、低ロス圧縮抵抗熔接点保護などのキー技術でのブレークスルーを実現し[8]、50mと200mの長さの温度/深度測定システムの開発に成功し、センサーの設計とパッケージング、復調器の長期の安定性、ウインチシステムの設計と統合デバッグなどの面で一連の技術的な難関を攻略し、これに応じた海上試験を完了し、現在、500mの曳航チェーンシステムの製造に取り組んでいる。
2016年7月、北黄海で曳航海上試験を行った。試験中のウインチと誘導滑車の現物写真を図4に示した。

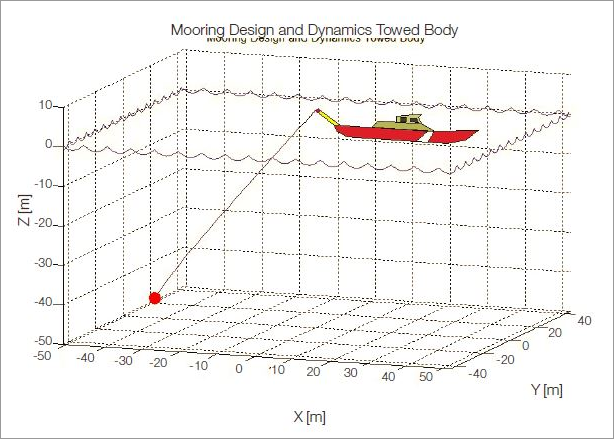
図4 ウインチと誘導滑車の現物写真と海上試験状態の模式図
夏季の黄海では冷水塊が旺盛となる。冷水塊は広く分布し、「品」字型に分布する。北黄海の冷水塊の中心は約38.5°Nに位置する。試験データからは、サーモクラインの等値線が傾斜状態を示していることが観測できる。南部のサーモクラインの位置は、北部のサーモクラインの位置よりも浅く、南部サーモクラインの等値線は北部に密集し、底 部には8℃の閉合冷水核心区が存在する。
サーミスタチェーンの曳航によって得られた海上試験データは、非常に高精度で空間分解能の高い冷水塊の観測を可能とし、従来型の海洋学の調査を支える重要な役割を果たす。既 存の調査手段をさらに豊富なものとするだけでなく、科学者による海洋現象の分析にクオリティの高いデータを提供し、海洋調査と海洋学研究の発展をさらに促進するものとなる。
2.2.2 深海生態プロセス長期定点観測システム
深海生態プロセス長期定点観測システム(以下「着陸器」)は、中国科学院瀋陽自動化研究所が研究開発したものである(図5)。2016年4月に南中国海で3000m級の海上試験を行った後、2016年6月には科学調査船「科学号」に搭載され、南中国海の冷湧水域で16日間にわたる水中連続観測を展開した。ROVと連携し、着陸器の観測点の位置を精確に調整し、冷湧水域の生物のハイビジョン画像と海底の物理や化学などの環境パラメーターの大量の観測データを獲得し、南中国海の冷湧水の生物群集とその環境の変化の特徴が潮汐周期との関連性を持っているかなどの科学問題を科学者が研究するのに有力なデータの支えを提供した。
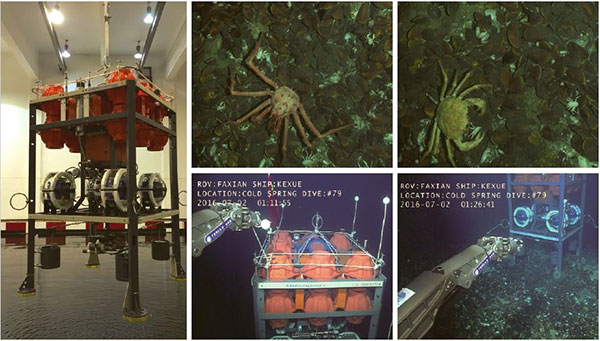
図5 深海生態プロセス長期定点観測システムとその科学調査への応用
試験的な科学応用を通じて、南中国海の冷湧水生物群集密集区の理化学的な環境パラメーターのその場データを獲得した。深海環境は低酸素条件にあるという一般的な認識とは異なり、着陸器の観測結果は、同区域のDO(溶存酸素)の飽和度が50%近くに達し、多数の貝類底生生物にはストレスを形成していないことを示した。ADCP(超音波ドップラー流速プロファイラー)の分析結果によると、この冷湧水域の底層流は非常に力強く、黒潮底層の海水がこの海流を経て冷湧水域に輸送され、底層生物のDOの消耗をすばやく補充していると考えられる。メタンの濃度は顕著な日変化を示し、潮汐がこの変化の主要な原因となっていると考えられる。メタン濃度の変化は、生物の行動に顕著な影響をもたらす。高メタン(CH4)濃度の時間には、深海貝Bathymodiolusが殻を開けて水を換える頻度がいくらか高まり、深海エビもCH4の値の高いエリアとともに移動する特性を示した。今回の結果は、メタン濃度が深海生物の行動に影響する主要な原因の一つであり、深海底層流と潮汐も深海生物に良好な生息環境を提供し、個体群の輸送に影響を与えることを示した。
2.3 世界と国内を技術的にリードする新型の海洋観測センサーとサンプリングシステムの開発
新型センサーと探査・サンプリング設備を開発し、大深度・高精度のその場精密探査・サンプリング能力を形成し、一部の成果は世界をリードする水準に達している。
2.3.1 深海ROVプラットフォームに基づくラマンスペクトルその場定量探査システム
ラマンスペクトルその場定量探査システム(RiPシステム)は、中国科学院海洋研究所が研究開発したもので、深海ROVプラットフォームに基づき、海底付近のその場探査を行う。レーザーラマン分光装置やプローブなどのカギとなるデバイスの技術的な難関を突破した後、システムの軽量化改造とダブル制御システムのアップグレードを行った。特定プロジェクトにおける「科学号」での2015年度と2016年度の冷湧水-熱水総合調査航海の科学調査任務を順調に完了し、マヌス熱水区域や沖縄トラフ熱水区域、中国南中国海北部冷湧水域などのターゲット区域に対するその場ラマンスペクトル探査をそれぞれ行い、一連の科学応用試験を展開した。
中国南中国海では、海底にむき出しとなった天然ガスハイドレートを初めて発見した。冷水湧出口付近の生物群集の下に表層天然ガスハイドレートを発見し、RiPシステムを通じて天然ガスハイドレートサンプルの深海その場ラマンスペクトルを獲得した。ラマンスペクトルデータは、これが標準I型ハイドレートであることを示した。
天然ガスハイドレートの生成と分解の過程に対する冷水湧出口付近の環境の影響を研究するため、中国南中国海の冷湧水の調査期間には、RiPシステムを利用して、冷水湧出口付近の湧出ガスのその場での急速なハイドレート生成の過程に対し、その場ラマンスペクトル探査を行った(図6)。
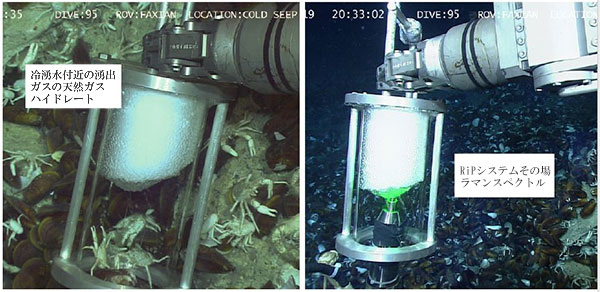
図6 冷湧水付近の湧出ガスの天然ガスハイドレートの急速な生成とラマンスペクトルその場探査
冷水湧出口付近の生物群集の下部の水中に、溶解したまたは浮遊態の自然硫黄(S8)を初めて発見し、これと硫酸根(SO42-)及びCH4の濃度と深度に一定の関連性があることを明らかにした。2016年度の2回にわたる調査航海の重復実験を通じてこの関連性を検証し、AOM(anaerobic oxidation of methane)過程を堆積物層から生物群集の下部水層へと拡張できることを明らかにした。さらに硫化水素をさらに酸化して自然硫黄とする微生物のかかわる新たな酸化反応が存在するという世界で初めての大胆な仮説を立てた。
熱水区域のさまざまな温度の熱水噴出孔の噴出体と熱水噴出孔付近の特殊システムに対してその場ラマンスペクトル探査を行った。2015年度の冷湧水-熱水総合調査研究期間には、RiPシステムによるマヌス熱水区域のブラックスモーカーとホワイトスモーカーに対するその場ラマンスペクトル探査を行い、ブラックスモーカー噴出孔付近の流体(280℃)中の化学成分の典型ラマンスペクトルを獲得した。2016年度の調査航海期間には、RiPシステムを利用して、沖縄トラフの熱水噴出孔付近の液態CO2poolに対してその場ラマンスペクトル探査を行った。
現在の研究成果は、深海熱水噴出孔や海底冷湧水などの極端区域の海洋化学分析に一種の新たな発想と方法を提供し、冷湧水や熱水の形成メカニズムや物質エネルギー交換過程などの科学問題の研究に有力なデータによる支えを提供するものとなっている。
2.3.2 深水可視化・可制御軽量型堆積物柱状サンプリングシステム
深水可視化・可制御軽量型堆積物柱状サンプリングシステム(以下「サンプリングシステム」)は、中国科学院海洋研究所が研究開発したもので、3 500mサンプリングシステムに対する工学的改造を行うと同時に、6000mサンプリングシステムを研究開発した。
2014年の3500mサンプリングシステムの海上試験においては、冷湧水と熱水の両区域で合計約12.5mの堆積物柱状サンプルを取得し、このうち最長のサンプルの長さは約285cmだった。2 015年の特定プロジェクト調査航海では、さらに改善を加えた3500mサンプリングシステムによって、南中国海の冷湧水とマヌスの熱水の2地域で合計約52.5mの堆積物柱状サンプルを取得し、最長サンプルの長さは10.9mに達し、サンプリング率は最高で90.8%に達した。堆積物サンプルに対し、10cmの層に分けた堆積物の間隙水を抽出し、510個の分層間隙水サンプルを獲得した。マヌス熱水区域の堆積物柱状サンプルの獲得は国内で初めてとなった。3500mサンプリングシステムの海上試験の様子と取得サンプルの画像を図7に示した。
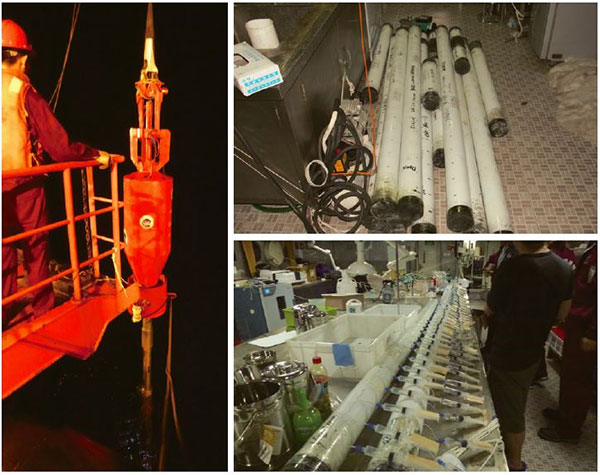
図7 3500m級サンプリングシステム海上試験及び取得サンプル
2016年の特定プロジェクトの調査航海では、6000mサンプリングシステムの海上試験を行い、サンプリングと調査活動に応用して約50mのサンプルを取得した。最長のサンプルの長さは約6.4mで、サンプリング率は最高で80%に達した。堆積物サンプルに対してその場での10cm分層の堆積物間隙水の抽出を行い、300個の分層の間隙水を獲得した。
間隙水の研究を例に取ると、南中国海の冷湧水の流体中にはCH4が豊かに含まれ、これらの流体は、自身の浮力の作用の下、優先経路に沿って海底に遷移する。この過程で、嫌気的メタン酸化菌と硫酸塩還元菌の作用の下、間隙水中の硫酸根やカルシウムイオンなどの成分の含有量を有効に変えることができる。同冷湧水地区ではハイドレートが幅広く成長している。これらのメタンに富んだ流体が天然ガスハイドレートの分解から来るものとすれば、放出される大量の水分は塩素イオンやナトリウムイオンなどの溶存イオンの含有量を低下させ、水分子のδ18O値にもそれが示されることとなる。このため間隙水中の特徴イオンの含有量は、海底流体活動の研究の重要な指標となる。
3500mと6500mのサンプリングシステムはいずれも、海上試験と応用を成功させ、大量の貴重なサンプルを獲得し、特定プロジェクトの各研究海域の堆積物の地球化学特徴と堆積環境進化などの面での研究活動を力強く保障した。
2.4 まとめ
特定プロジェクトの科学的なニーズを満たすため、プロジェクトの深海海洋探査設備は、研究開発と試験、応用を経た後、一定の研究成果を取得し、特定プロジェクトの科学研究に、先進的で実用的な信頼性の高い技術手段を提供した。2017年度には、科学目標をめぐってヘテロジニアスな海洋探査設備応用システムを構築し、プロジェクトの研究開した水面・水中・海 底などのさまざまなタイプの設備を総合的に利用し、さまざまな深度やスケールのマルチシステムによる協同立体観測・作業を展開し、価値あるマルチパラメーター協同観測データを科学研究に提供することとなる。
3 発展の展望
海洋に対する人類の認識は、長期的でゆっくりとした過程である。このため作業時間がより長く、航続距離がより長く、深度がより深く、作業能力がより強く、スマート化のより進んだ海洋技術設備を研究開発し、海洋の認識を土台として、海洋利用と海洋開発という目標を一歩ずつ実現する必要がある。技術の革新と進歩、実用性・信頼性・スマート化の方向への深海技術設備の発展に伴い、中国の深海技術とその設備は、海洋科学調査と国民経済への奉仕の面で重要な役割を果たしていくこととなる。
(1)単一的な設備から多元的で群をなした設備への発展の面では、単体技術に立脚し、世界の海域における群体式の海洋技術設備による自律協同探査と自律作業を実現し、海洋科学の研究目標に基づくマルチな海洋探査設備の統合・実演システムを構築し、長期・協力・マルチシステム・低コスト・全立体式などの特徴を備えた海洋情報総合探査・作業能力を形成する。プ ロジェクトによって開発されすでに海上試験を経た技術設備を利用し、科学目標と結びつけ、多類型・多機器・多用途の海洋設備の統合デモンストレーションを行い、モデル応用を展開する。多種類の類型の異なる設備を利用し、さまざまな深度とスケールの立体観測を展開し、価値あるマルチパラメーター協同観測データを科学研究に提供し、本特定プロジェクトと国家の関連特定プロジェクトの有機的な接合に堅固な技術的土台を築く。
(2)人類による海洋活動の類型の転換の面では、作業能力を備えた深海設備の研究開発と難関突破を強化し、人類の海洋活動の情報型から作業型への転換を実現する。海洋設備の探査・作業能力の充実化と向上をはかり、自律観測から自律探査、最終的には自律作業へという目標を実現する。情報型から作業型への転換の実現は、深海技術設備の重要な発展の傾向の一つである。海洋に対する人類の認識は、長期的な過程であり、努力を通じて、より高い知能とより強い作業能力を備えた海洋設備を研究開発し、海洋の認識を土台として、海洋利用と海洋開発の目標を一歩ずつ実現し、観測から探査、最終的には作業へという目標を実現する必要がある。
(3)中国の海洋設備の実用性・信頼性・知能水準のさらなる向上の面では、特定プロジェクトの目標に立脚し、海洋科学問題を解决する新たな案を推進し、海洋探査・研究の無人時代を切り開く。海洋技術設備の発展が無人化時代に全面的に入っていく中、広範囲探査と精密作業の能力を備えた知能化海洋ロボットは、海洋技術設備の発展を全面的にリードし、海洋科学問題の研究に強力な技術手段を提供するものとなる。水面では無人科学調査船をサポートプラットフォーム、水中では無人科学調査ステーションをサポートプラットフォームとし、陸上の実験室を海底に移設し、海面から下へ、海底から上へという二つの次元から海洋を研究する。この2種類のサポートプラットフォームを拠り所として、海洋中の無人システムにエネルギーの補充と情報のインタラクションを提供する。このようにして海洋ロボットに基づく長期的な総合立体無人探査・作業システムを構築し、人間を主体とした現在の科学調査モデルを完全に改変し、高い知能水準を備えた群体海洋ロボットを核心とした未来の科学調査モデルを構築し、海洋科学の研究に高い価値のある科学調査データを提供し、人類による海洋のさらに良好な開発と利用に大きな貢献を果たす。
4 結語
中国科学院海洋先導特定プロジェクトの順調な実施は、深海海洋技術の発展と進歩を推進し、特定プロジェクトの科学目標をめぐって、多くの独自の科学技術の成果を取得し、中国の海洋分野の科学技術革新能力を高め、中国の科学技術事業の革新の飛躍的な発展に重要な貢献を果たした。海洋先導特定プロジェクトは、海洋を初めて一つの全体としてとらえ、システムの角度から研究を展開し、各プロジェクト間の有機的な連係を保ち、先進的な探査手段を科学に提供した。さらに深海技術設備そのものも一つの有機的な全体を形成し、海洋科学研究に向けた技術体系を構築した。科学問題をターゲットとして、機能や深度等級の異なる各種の類型の海洋設備の協同観測を可能とし、大量のマルチパラメーター科学調査データを取得し、人類の無人化時代における海洋の探査と海洋の認識に一種の新たな技術的な解决案と手段を提供した。
(おわり)
参考文献:
[8]. Zhao Q, Qu Y, Wang Y J, et al. Wavelength evolution of long-period fiber gratings in a water environment. Appl Opt, 2013, 52(11): 2478-2483.
※本稿は李碩,唐元貴,黄琰,劉鉄軍,劉健,李彬,張鑫,欒振東,王永傑「深海技術装備研制現状与展望」(『中国科学院院刊』2016年第31卷第12期、pp.1316-1325)を『中国科学院院刊』編 集部の許可を得て日本語訳・転載したものである。記事提供:同方知網(北京)技術有限公司