中国科学院、魚ロボットを開発
2014年11月14日
普通の人は魚と言えば、調理されテーブルに並べられた魚料理を思い出すだろう。しかし中国科学院自動化研究所魚ロボット研究チームのメンバーが魚を見てまず考えることは、魚ロボットに本物そっくりの泳ぎ方をさせるためには、いかに制御方式を改善すればよいかだ。人民日報が伝えた。
同チームのメンバー、中国科学院自動化研究所研究院の王碩氏は、「チームは10数年も魚ロボットを研究している。チームの譚民氏が2001年にこの研究を開始し、最初に取り組んだのが魚の動き方の模倣だった」と語った。
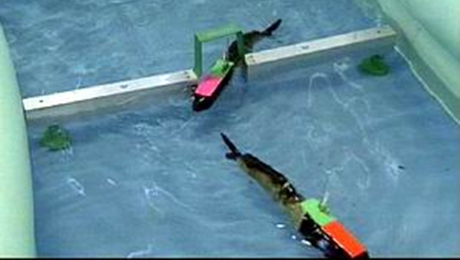
研究チームは約2年後、魚ロボットの環境に対する適応性を高めるためには、水中で立体的に動く機能が必要であることを理解した。簡単な前後の動きの他に、浮上・潜水、また、一定の水深を維持したままの移動ができなければならない。研究チームは多くの関節を持つ魚ロボットをベースに、新型魚ロボットを設計し、浮上と潜水を実現した。
研究チームは10数年の取り組みにより、生体工学、ロボット工学、機械工学、スマート制御を結びつけ、魚の泳ぎ方のメカニズムの研究を進めた。体・尾びれ推進、胸びれ推進、水陸両用、イルカ式推進などの製品を開発した。高機動力・高速遊泳という2大指標を巡り、マルチモード制御技術を利用し多種多様な性能を集約した、高性能ロボット魚プラットフォームを構築した。
王氏は、「産業・軍需などの需要が、ロボット工学の研究を促している。現在は学習・模倣により生物の形態・構造・機能などを複製・再現することが、ロボット工学の重要な研究方針となっている」と語った。
※掲載された記事、写真の無断転載を禁じます