スマートフレキシブルジョイント―ロボットのしなやかな動きの秘密
2019年9月19日 操秀英(科技日報記者)
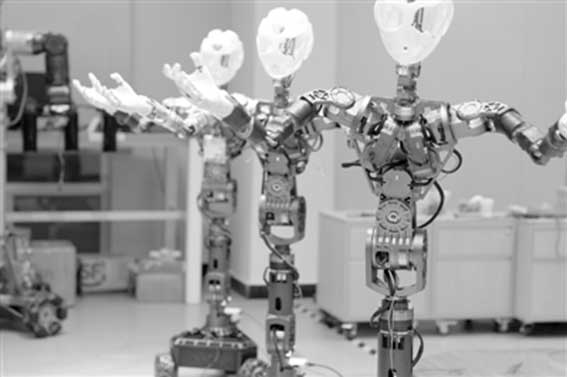
スマートコンプライアントアクチュエーター(SCA)を採用したスマートコンプライアントサービスロボットの自由度は34、つまり、関節が34個ある。(画像は前沿駆動≪北京≫技術有限公司提供)

スマートコンプライアントアクチュエーター(SCA)は高集積、高精度、制御バス、コンプライアント機能、低コストなどの特徴を備えている。(画像は前沿駆動≪北京≫技術有限公司提供)
ロボットがお茶を運んだり、お茶を注いだり、道案内をしたり、ダンスを踊ったり、質問に答える―。このほど開催された「2019世界ロボット大会」では、一層自然な動きをするスマートサービスロボットが展示され、来場者を感嘆させた。人とロボットが共存するスマート時代が加速しながら到来しようとしている。
人と同じで、ロボットがしなやかな動きができるかどうかは、関節のクオリティにかかっている。今回のロボット大会では、前沿駆動(北京)技術有限公司の研究開発チームINNFOSが数年かけて自主研究開発し、披露したスマートコンプライアントアクチュエーター(Smart Compliant Actuator, SCA)や同技術を搭載した2種類の製品が大きな注目を集めた。
SCAは、長きにわたりロボット、特にサービスロボットの研究開発、生産においてクリアしなければならない難題と言われてきた。では、SCAとはどのように克服しなければならない難題で、また、その技術はどのような点で優位性を誇るのだろうか?
フレキシブルジョイントが中国のサービスロボットの発展の足かせに
SCA、つまりフレキシブルジョイントがロボットにとって重要であることは言うまでもない。ロボットの全ての動きは「関節」と密接な関係があるからだ。
INNFOSの共同創始者の一人・朱梓鳴氏は、「業界はロボットの関節の自由度を高めるために人間の筋肉と骨格を模倣している。通常、自由度の数はすなわち関節の数だ。例えば工場の4軸式の機械アームの1軸は関節。一台のロボットの、関節のコストは、ハードウェアのコスト全体の70%以上を占めている」と説明する。
また、サービスロボットと工業ロボットでは、関節に対する要求が全く異なる。
朱氏によると、工業ロボットは、長期間にわたって安定して使えることが求められ、しなやかさや自己適応性に対する要求は高くないとし、「工業ロボットは、計画どおりの動作をすればそれでよく、いろんな変化は求められない。一方、サービスロボットはそれとは異なり、歩いたり、様々な動作をしたりする機能があり、自然と関節のしやなやかさに対する要求が非常に高くなる。そのため、工業ロボットの関節のほとんどは、高剛性のアクチュエータが必要であるのに対して、サービスロボットはSCAが必要となる」という。
これまで、最も有名な人型ロボットを製作していたのはボストン・ダイナミクスだった。2017年、同社が公開したロボットがジャンプしたり、回転したり、バック転したりする動画は、ロボット業界に衝撃を与えた。そしてロボットの関節のしなやかさに、多くの人が驚嘆した。
しかし、だからといってスマートフレキシブルジョイントに何も問題がないわけではない。朱氏は、「私たちが知る限り、現在、スマートフレキシブルジョイントの技術を掌握しているのは、世界でも3、4社だけ。うち、ボストン・ダイナミクスの技術は非公開で、MASA[1]も同じく民用については非公開だ」と説明する。
このため、現時点で、ほとんどの工業ロボットに採用されているのは体積が大きく、剛性が強い従来型のサーボ機構だ。しかし、サービスロボットは、大きさが限られているため、従来型のサーボ機構を搭載することはできず、飛行機模型や玩具用に開発されたサーボモーターを仕方なく搭載している。
朱氏は、「サーボモーターは故障率が高く、騒音も大きく、決してスマートとは言えない。これが、現在のサービスロボットを見ても、何かぎこちなさを感じさせてしまう原因だ。高性能のフレキシブルジョイントが不足していることが、サービスロボットの発展の大きな足かせになっている」とし、「そのため、1から始めて、7年間かけて、SCAを研究開発した」と語った。
ロボットに搭載可能な小型SCAの秘密はコア動的システムの開発
端的に言うと、今回の大会で披露されたSCAは、伝統的な工業サーボ機構を、サーボモーターの大きさにし、両者のメリットを兼ね備えている。「工業サーボ機構をサービスロボットに応用するために解決しなければならなかった最大の問題は、性能を犠牲にせず、それをいかにサービスロボットに搭載できる大きさにまで、小さくまとめるかだった」と朱氏。
工業サーボ機構の本来独立している電気機械、ドライバ、減速機、エンコーダなどのコア部品を、いかに一つにまとめるのか、それはたくさんのチップを一つのプリント基板にまとめるのと同じことなのだろうか?実際には、最も基本的なことから始め、それぞれがマッチングし、最大効率を発揮できる電気機械、ドライバを研究開発することだった。
「まず、超薄型のアウターロータを選んだ。このロータを採用するとフラットにすることができる。以前は応用されている分野はあまりなく、大規模生産はされていなかった。しかし、研究を通して、そのフラット化の特徴は、集積型のアクチュエータに適していることが分かった」と朱氏。
適切な電気機械が決まった後、研究開発チームは、電気機械の特徴に基づいて、マッチングの高いドライバ、エンコーダなどの部品を研究開発した。
例えば、一般的な工業サーボドライバはたくさんの電気機械に搭載されているが、多くの場合余剰分が出る。その点、朱氏は、「チョイスした電気機械のために特別なドライバを研究開発し、余剰分を減らした。そのため、ここ数年は、いくつかの部品の関係性を繰り返し調整し、どうすれば、それらができるだけ小さな空間で、互いに連動しながら、最大の役割を果たすことができるかを研究することだけに、時間を費やしてきた」と説明する。
最終的に、同研究チームは、同じ性能を保ちながら、伝統的なサーボ機構の10分の1の体積というSCAを実現した。さらに重要なのは、中国のロボット分野の電気機械、減速機などのコア部品は現在、他国の状況の制約を受けているが、今後はそれに変化が起きる可能性がある点だ。広く知られているように、精密減速機やコントローラー、サーボ電気機械などのロボットのコア部品はこれまでずっと、海外の大手企業数社の独占状態で、中国国内企業に、それを自主生産する能力は今のところまだない。コア部品が海外企業の制約を受けているため、結果として値段は下がらず、利益も薄く、製品を供給してもらうのにも時間がかかる。
朱氏は「当社は数年前、海外の有名メーカーに、約60万元の電気機械を注文していた。その量は、そのメーカーにしてみれば、とても少なく、値段交渉をする余地はなかった上、何ヶ月も待たなければならなかった。中国国内のロボットメーカーにとって、それはいたって普通の状況だ」と指摘する。
そして、「当社は電気機械やドライバなどから始めたため、コア技術を独自に掌握している。そのため、以前のように受け身になる必要はもうないし、中国国内外のクライアントにスピーディーに製品を供給できるようになった」と話す。
ハードウェアコストを下げて産業全体の発展を促進
SCAをベースに、研究開発チームは現在、四足歩行のロボットのためにカスタマイズしたフレキシブルジョイントやSCAの複合材料版など、さまざまなロボットに応用できるフレキシブルジョイントを開発中だ。
業界関係者によると、四足歩行のロボットは、さまざまな路面状況下で、立ったり、歩いたり、飛び跳ねたり、何かを背負ったりしなければならず、そのアクチュエータに対する要求は非常に高い。
通常、四足歩行のロボットのアクチュエータには、トルクの密度が高い、出力密度が高い、コントロールシステムが高集積、コンプライアンス制御などの特徴が求められる。四足歩行ロボットのトルクに対する要求を満たすために、INNFOSの研究開発チームは、減速機を搭載し、トルクを増やすと同時に、機械のメカニズムを精巧にした。そして、減速機を搭載することで、アクチュエータの全体の質量が453.1グラムの状態で、トルクのピーク値が19.8ニュートンメートルに達した。そして、そのトルク密度が大幅に向上し、四足歩行ロボットのトルクやトルク密度に対する要求を一層満たすようになった。「リングカレントを通して、低コストで力制御を実現できる。また、ダイレクトドライブ技術を活用し、小さなギヤ比で、高いトルク密度の電気機械を採用することができ、低コストで、大量生産できる状況下で、力制御を実現できる」と朱氏。
コンプライアンス制御は、ロボット系製品には欠かせない。研究開発者は、アクチュエータ内に、一連の感知部品を搭載し、プロセッサーと連動させて内部の電流の状態を監視し、最後にハイレベルの動力学アルゴリズムのサポート下で、アクチュエータのコンプライアンス技術を確立することで、安全で実用的なヒューマンコンピュータインタラクションを実現した。
同チームが発表したSCA複合材料版は、フレキシブルジョイントの価格を1千元(約1万5,000円)以内にまで下げた。朱氏は、「同技術における全ての動力システムは、標準版と同じ。放熱を使用することでコストを下げることができた。精度は高く、コストの安い複合材料だ」と説明する。
また、アクチュエータ内に、電気機械の運行データを処理する高性能のマルチコア浮動小数点演算プロセッサーを搭載することで、リアルタイムの高精度コントロールを実現した。
数百元のフレキシブルジョイントがサービスロボットの発展において大きなカギを握っている。朱氏は、「ハードウェアコストが大幅に下がることで、産業全体の発展、特に教育、研究開発の分野での普及を促進することは間違いない」との見方を示す。
[1]原文ママ
※本稿は、科技日報「智能柔性関節 機器人騰挪跳躍的秘訣」(2019年8月30日付6面)を科技日報の許諾を得て日本語訳/転載したものである。