玉兎号、高性能ロボットアームを駆使
2014年01月22日
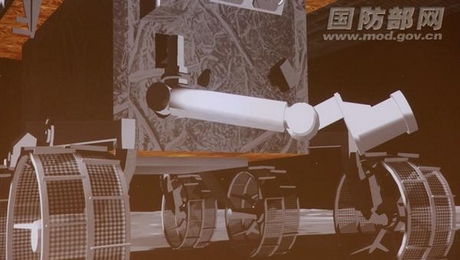
月面ローバー「玉兎号」のロボットアームは重さ3.5キロ、長さ55センチ、直径5センチで、少年の腕のような形をしている。人と異なり、このロボットアームには肩と腕しかなく、肘がない。腕はアルミ合金で、関節に使われている部品は主にチタン合金を採用している。新華社が伝えた。
上海航天技術研究院八〇五研究所の研究員である虞紅氏は、「2013年12月14日に、月探査機・嫦娥3号が月面着陸に成功すると、玉兎号は順調に着陸機を離れ、月面に投入された。12月22日、月面車の真正面にある中国国旗の下に位置するロボットアームが、初めて命令を受け正確に動かされた。これは私たちのチームが最も興奮した瞬間だ。月面でも、ロボットアームが全て正常に動くことが示された」と語った。
この玉兎号の腕は、中国が初めて地球外の天体探査に使用した、高精度・スマート制御の宇宙ロボットアームだ。同ロボットアームは現在までに、月面で3回の作業を実施している。同ロボットアームは12月25日、アーム前方に固定されたアルファ粒子X線分光計を使い、月の土壌に対して正確な測定を実施した。地球上の14日間に相当する月の長い夜を経て、月面ローバーは自動的にスリープ状態を解除した。同ロボットアームは今年1月14日、再びアルファ粒子X線分光計と共に測定を実施した。
虞氏は、「ロボットアームはアルファ粒子X線分光計を、測定目標から10−30ミリ離れた位置に近づけた。これらの動作は、誤差が2ミリ以内だった。ロボットアームを使用するたびに、約20の細かい動作を実行する必要があるが、これは3つの関節の協力によって実現される」と説明した。
玉兎号の投入・測定はうまくいった。では、測定結果はどうだろうか?嫦娥3号任務の科学応用研究核心チームの責任者である林楊挺氏はチームを率い、玉兎号が月面到着後の初日の昼に伝送したデータの分析を進めている。
中国国家国防科技工業局はこのほど、嫦娥3号の初の天体観測・地球観測・月測定の段階的な成果を発表した。
林氏は、「アルファ粒子X線分光計の月の土壌に対する正確な測定により、11種の元素が発見されたことに勇気づけられた。そのうちストロンチウム、イットリウム、ジルコニウムの3種の元素は、測定が非常に困難だ。これは中国の分光計とロボットアームの性能が非常に優れていることを意味する」と語った。
虞氏は、「月面ローバーは高級ロボットで、ロボットアームはその科学探査の使命を手伝う。開発の中で直面した最大の難点は、不慣れな月の環境だ。高真空、摂氏300度以上の気温差、あちこちに漂う粉塵、地球の6分の1の重力は、ロボットアームの構造設計、潤滑技術、使用寿命、地上試験に数多くの課題を突きつけた」と説明した。
虞氏は、「このロボットアームは正真正銘の中国製で、すでに数多くの特許を出願している。ロボットアームが月で優れた成果を獲得し続け、さらに民間用になり一般人の役に立つことを願っている」と話した。