【21-02】第13回 中国農業機械の進化―農機全領域で進むにロボット化、自動化―
2021年02月24日

高橋五郎: 愛知大学名誉教授(農学博士)
略歴
愛知大学国際中国学研究センターフェロー
中国経済経営学会前会長
研究領域 中国農業問題全般
中国の農業機械化は企業型大規模農業や100ムー(6.7ヘクタール)程度の規模の比較的大きい個人農家の出現で大型化してきている。トラクターの用途は広い。水稲、麦、トウモロコシ、野菜と、およそ自然土壌を使う農作業には大きな力を発揮する。まだ多くの地方で牛耕も残っているとはいえ、徐々に、その数は減っている。
中国のトラクターは小さなものでは20馬力程度、最大で180馬力、高さ3メートルを超える日本にはないような大型機がある。一方、日本で呼ぶ二輪耕運機もいまだ健在だ。
二輪耕運機は徐々に小型トラックに置き換わってきたが、わずか10年ほど前までは、中規模農家の夫婦が仲良く二人で腰掛けて、農地や買い物に通う自家用車代わりに重用されていたものである。ただし難点は、ディーゼルエンジンの性能のためか、車体が隠れるほどの黒煙をあげ、エンジン音がばかでかいことで、それでなくとも破裂音が半端でないむき出しの発動機を搭載しているので、村中が大型の爆竹を鳴らしたようなけたたましい音がすることだ。
もちろん、主な用途は田畑の耕耘作業と農産物の運搬作業で、運搬する際には、後ろに二輪リアカーを牽引する。
トラクターと耕運機は土壌を耕し、水稲作の場合は代かきと均平、運搬が主な用途である。土壌を耕すといっても二通りあり、土壌を天地返しすることと、硬くなった土壌を深く掘り返しながら細断する作業がある。前者の作業時に後ろに装着するのが犂、土壌細断時に装着するのがロータリー(写真1)。これらを一括して作業機と呼ぶ。

写真1:河北省で筆者撮影。幅2m、毎分260回転、重量約500㎏
実は、この犂やロータリーに付ける耕耘刃(中国では、「深耕刀刀片」と呼ぶのが一般的)は、技術の結晶ともいえる代物だ。一つは素材、もう一つはその形状・重量・丈夫さに土着的な技術がある(写真2:写真1の耕耘刃)。

写真2:写真1に同じ。訪れた農場では小麦、トウモロコシ土壌で使用
日本では、昔、どの村にも「野鍛冶」と呼ばれる職人鍛冶屋さんがいた。主な仕事は、農作業に使う鎌、鍬、鋤、犂、鉈などの製造と修理。なぜ村々にあったかというと使う農具が村々で特徴があり、土着的な固有性があったからだといわれている。
戦後、1960年代になると牛耕や馬耕、手労働の代わりに耕運機が急速に普及し始めた。出稼ぎ収入が全国に行き渡り、春・秋の農作業を早めに済ませ、出稼ぎに出かけることができるようになった。
そこで売れ出したのが耕運機用の耕運刃と犂だった。村々の野鍛冶の中には、その製造や修理に携わる者があった。やがて、中国の郷鎮企業のように大きくなって行った者も現れた。一例だが兵庫県の三田市には、そのように成長した元野鍛冶の耕運刃工場がけっこうあった。筆者自身、いくつかの工場へ見学に行き、そこで製造された黒いペンキ塗りの耕運刃を、何種類か頂いてきたことがある。三田市は鉄産地の山陰山脈に近いことも、そのような工場ができた一因で、その製品はいま、中国にも輸出されている。
耕運刃や犂は、地域・地域で多様な農地土壌や栽培作物の影響を受けて、地域的な多様性がある。日本のものが、そのまま中国で使えるとは限らない。中国には日本以上の土壌や作物の多様性があるからだ。だから、耕運刃や犂は見た目の構造や形状は単純でも、だれにでも製造できるというものではない。
コンバインやバインダーなどの収穫機が不可欠な小麦やトウモロコシ、水稲などを刈り取る大きなカニのはさみのような刈刃も、収穫する作物の茎の硬さや長さから物理的な影響を受ける。あるとき、中国とかかわりの深い日本の大手農機メーカーの旧知の専務さんと話をしたとき、彼は、日本製の刈刃を中国で使うと欠けやすい、と言ったことがある。
「刃」の付く部分は敏感かつ頑丈さが必要で、さらに機械自体の大小、馬力などがその多様性に拍車をかける。
更に収穫と脱穀の両作業を同時にこなすので、収穫機自体は大型化・複雑化している。
巨大化がすすむコンバイン、トラクター
中国の農村では、コンバインも2トントラックほどもあるような大型が使われている。(写真3)こうなると大型化を超えて「巨大化」というにふさわしくはないか?
麦やトウモロコシの収穫期の農村へ行くと、戦車のように大きい箱形のコンバインが、大きな口で茎の束を飲み込むように、うねりをあげて収穫する姿が目に入ることがある。

写真3:青海省で筆者撮影
水稲作業の場合は、重量のある大型では無理だが、足下が重くても刈り取りができるように、キャタピラか大型の幅30センチ以上、直径2メートル以上はあろうかと思われるタイヤを履いたコンバインやバインダーが重宝される。
コンバインを使うと、麦もトウモロコシも水稲も茎は短く裁断されるので、昔の手狩り時代のように、茎や稲わらは生じない。処理の仕方は、麦の茎の場合はこれも機械で円筒形に丸めて乾燥、家畜の飼料に回すこともある。
トウモロコシの茎は硬くて量が多く出るので、収穫後しばらくは畑にばらまいておき、次期が来たら土壌にすき込むこともあるし、畑の隅に山積みにして発酵を待ち、有機肥料に仕立て上げる場合もある。一部は家畜の飼料に混ぜることもあるが、トウモロコシの茎は青い時ならば家畜も喜んで食べるが、乾燥しきって味も水分も無くなると単品では喜ばないので、他の飼料と混ぜ合わせるなどして与えるようになる。
アメリカベースのディア天津トラクター工業が製造販売するコンバインに典型的だが、刈り取ったあとの茎を円筒形に丸めながら粉砕、粉のようにしてから、畑に播くように廃棄する大雑把な機械も流行している。
やがて、中国の農業において小農的な形態が減少していき、アメリカ式に変わっていくと見ている筆者は、現在のこのような巨大化しつつ繊細さを失っていくような事態は、農業変貌の通過点の一つではないかと思いながら現状を観察している。
フルセットで進化
中国の農業機械の進化はそうした文脈の中で、大きく変化している。前回まで取り上げた農業用ドローンもこの文脈に含まれるが、そのキーワードは、やはり農業用ロボット、人工知能農業機械、自動運転もしくは自動化で、それは個別の農作業ごとではなく、あらゆる農作業や管理保管・物流・商流までを網羅するフルセット型に進むと考えられる。
ただしこの点は、世界的な傾向でもある(元JA全中の櫻井勇氏によると、日本でもK社などを中心に、同様の文脈での機械化・情報化が進められようとしているという)。あえて中国の特徴を指摘するとすれば、農業現場や食料消費基盤の他の国にはない多様性を前提とする限り、世界の中で最もスタイルに富んだフルセットになろう。その一端の実態をこれから紹介しながら、コメントしていきたい。
米・英・仏・独・日に比べ、農業用ロボットはやや立ち遅れ
まず、現在の中国農業機械の発展程度がどこまで来ているかを概観する。この点を測るには、まずは農業用ロボットの実用化の程度を見るとわかりやすい。ただし実用化の程度を唯一の指標にすることは避けるべきである。
というのは、農業用ロボットの分野はどの国でもまだまだ発展途上にあり、これから発展する余地は、これまでの到達点に比べ、十分すぎるほど大きいからである。では、まず見るべきことは何かというと、特許件数とその内容である。この点の現状を詳細に見ると、今後、農業用ロボットが発展する余地を埋める可能性があるかどうかを、ある程度判断することができる。
そして、農業用ロボットの定義自体がまだ固まっている状態ではないので、ここでは広く、ロボットとか自動化とかAI操作とか、ある程度同質の技術が組み込まれている農業機械を考えることも大事な点である。
これらの技術が組み込まれているものをくくって農業用ロボットと表現するだけで、それぞれの技術がどのようにあるいはどのようなところにコア技術として使われているかによって、ロボットとか自動化とか、表現に差ができる。しかし、けっして本質的な差ではなく、性格的なものなのである。
世界的な傾向として、現在、耕種農業分野で農業用ロボットの開発と実用化が注目されている主な分野は、耕運、施肥、播種・定植、農薬散布、温度管理(ハウス栽培)、収穫、生育監視、選果、洗浄、保管、精米、パッキングの各作業である。
畜産業では、スマート畜産などと表現されることもある家畜のデータ管理、給餌、搾乳、殺菌、パッキング、屠畜、カット、保管、集卵、卵黄白分離・保管・輸送である。
これらのうち、農業用ロボットの開発・実用化が最も急がれている分野は耕種農業では農業用ドローンの際にも述べた監視・消毒・施肥作業、野菜や果物など青果物の収穫・分類作業、畜産業では搾乳、鶏肉解体作業といわれている。
青果物の収穫ロボット
日本や世界同様、中国が最も力を入れている分野の一つがトマト、キュウリ、ナス、ピーマンなどナス科植物の収穫用ロボット開発だ。筆者の見たところ、まだ、実用化の段階にはなく研究・開発に研究者や企業がしのぎを削っているのが実態である。
青果物の収穫ロボットの実用化が難しい点は、枝や個体で異なる青果物の熟成度の判断、大きさや形状の異なる個体の安全な捕捉と収穫、その収穫箱への安置、枝ごとに異なる高さや奥行きにある個体の把握と収穫、そして安全正確な圃場内移動の確保などに関することである。
現在、これらの条件を完全に満たした青果物の収穫ロボットは、世界的にも完成していない。最も進んだ技術を持っているのはアメリカのジョン・ディア社と思われるが、日本の数社も開発に巨費をつぎ込んではいるものの、実用化の目途すらたっていないのが現状と言われる。
そんな中、中国ではある個人研究者が開発・実用化に取り組んでいるキュウリの収穫ロボット(写真4)が注目を集めている。
移動式ロボットの手がキュウリを掴んでツタから切り採り、くるりと回転しながら収穫箱に安置するまで完成した技術が紹介されている。キュウリの成長は早く、大量のキュウリを毎日収穫しなければならない。このロボットは1日1台で、キュウリの収穫作業に慣れた5人分の手作業に等しい14,400個を収穫できるという。
しかしなお改良の余地があり、この研究者は引き続き、幅広い観点からの試行を重ねている模様である。
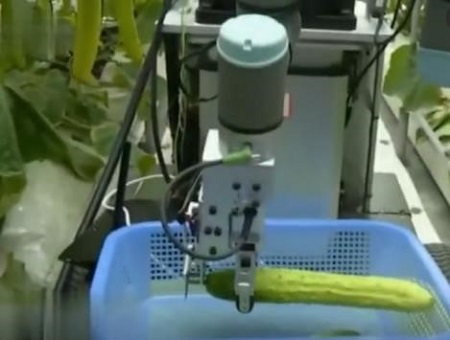
写真4:騰訊視頻より
搾乳ロボット
酪農で、毎日欠かすことができない作業は給餌と搾乳である。酪農家はこの作業を一日たりとも欠かすことはできない。しかも搾乳には時間がかかり衛生にも気を遣わなければならない。頭数が多いほど、作業はきつく、休む間もない。
そのような苦労を軽減するためにも実用化されたのが、搾乳ロボットである。搾乳ロボットは多頭飼養乳牛の給餌と搾乳を同時に、かつ短時間でできることから、酪農の生産性を高めることや乳牛のストレスを緩和することができるなどのメリットがある。
また、乳牛個体の乳量、体重などの個体管理情報の収集と応用など幅広い応用も可能である。
一方コストがかかる点は、最も改良が期待される部分である。
中国の酪農規模は一般に日本の比ではなく、それだけに搾乳ロボットも多頭向きの性能が要求される(写真5)。

(写真5:中型ロータリーパーラー型搾乳ロボットの例:安徽永牧機械公司 製)
以下、次号に続く。