【21-05】第16回 農業機械全般の最近目立つ技術改良点
2021年06月10日

高橋五郎: 愛知大学名誉教授(農学博士)
略歴
愛知大学国際中国学研究センターフェロー
中国経済経営学会前会長
研究領域 中国農業問題全般
1、新技術開発は播種・収穫機に重点
(1)全体の特徴
最近、技術的な改良が取り組まれているのは農業機械のどのような用途についてか、という点は農業機械化の現状と今後の方向を把握できる指標である。
世界的傾向として、最近の農業機械化は経営単位当たり栽培面積の拡大、農作業労力の削減、農作業時間の削減などに対応した変化が見られる。どの国にとってもコスト削減が喫緊の課題になっているからだ。この点、農業の国際競争力を急速に失いつつある中国では、更にいっそうの取組みが要請されている。
中国知識産権局特許権公告を集計すると、中国が特に力を入れているのが播種と収穫であることがうかがわれる。もう一つの特徴は、用途が特定しにくい「分類不能」な農業機械の技術改良が進んでいることだ。
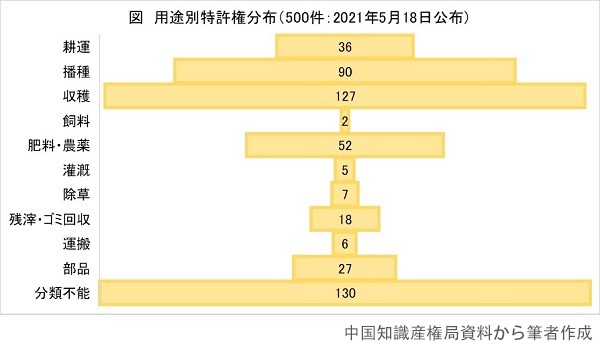
以上を図によって詳述しよう。図は当該公告から農業機械をキーワードに、順に500件まで拾い上げ、用途別分布をグラフ化したものだ。用途は図にあるように耕運から分類不能までの11用途、最近増えてきた残滓・ゴミ回収、たとえば使用済みマルチ(ビニール)や収穫後に圃場に残った野菜くず、茎や藁の回収作業機などもかなりの出現率だ。
用途が明瞭なもののうち最多は収穫であり127件、出現率25.4%、2位が播種90件、18.0%、3位は肥料・農薬で52件、10.4%となっている。
収穫に関しては穀物、果物、野菜を対象に自動化・省力化のための改良、播種作業機改良などである。肥料・農薬では、やはりトラクター施肥作業機、ドローン式散布機や散布機器改良などが目立つ。
播種・収穫は耕運と並んで労力を最も多く使う作業過程であり、なお省力化と効率化を進める余地が残っている。この二つの用途に向けられた技術改良は、この点を反映し、なお終了することはなかろう。
残滓・ゴミ回収に関しては農村の環境保全、土壌汚染の防止など、現代的な課題に取り組むことがインセンティブになっている面がある。この部分は冒頭で挙げた最近の農業機械化の要因に、直接寄与するものではない。むしろ経営コストの上積みになる性格のものだが、環境問題をめぐる時世の流れであるとともに、最近、政府筋が言い出した農村景観問題への対応施策などとも関係していよう。
130件、26.0%と数字の面で最多の「分類不能」とは、たとえば環境保全型農業機械塗料、単一の空気圧作物栄養機械、ミニチュア野菜工場などだ。
塗料そのものは農業機械ではないが、農業機械と一体となって土壌と植物の安全を考慮したものである。最近は化学的処理を加えた特別の塗料を塗り、圃場の殺菌や環境保全に資するものも現れている。
ミニチュア野菜工場とは本コラムでも取り上げた植物工場の一種といえるが、中国では農業機械の範疇に属するから不思議なことでもある。
用途が「分類不能」なものが、これだけ多いことが意味することはなんであろうか?
農作業のうち、これまで農業機械化の対象にならなかったがその対象が広がったこと、すなわち農業技術の進歩を支える化学、機械学、材料学、制御技術など多くの分野の進歩
があったことを意味しよう。加えて、農作業のあらゆる分野で省力化・安全化と労働を機械に置き換えることを通じた農業全体の効率化と工場化を展望するようになったことであろう。
(2)いくつかの事例
①人工知能灌漑システム
人工知能を使い灌漑全体をコントロールする技術で、地平線まで続くような広い圃場を持つ中国では日本以上にこの技術が期待されてきた。
システムには、データ取得モジュール、インテリジェント分析モジュール、インテリジェント灌漑モジュールなどを組み入れている。データ取得モジュールは、湿度センサーおよび画像コレクター機能を持ち、インテリジェント分析モジュールにはマイクロコンピューター、ウォーターポンプ、ワイヤレス通信モジュールを具備する。
湿度センサーは収集後の乾燥土壌湿度信号をマイクロコンピューターに送信し、これが乾燥土壌湿度信号に応じてウォーターポンプを操作する。画像コレクターは収集した画像を認識し、識別された植物特性データをマイクロコンピューターとAPP汎用モジュールに送信する。
マイクロコンピューターは、植物の特性データに従ってウォーターポンプのスイッチを制御し、APP汎用モジュールはその特性データに従ってウォーターポンプのスイッチを制御する。
以上ように、Raspberry Pi(ラズベリーパイ)モジュールを使用して、土壌、温度、および植物の状態を分析し、定量的で定期的かつ均一な自動灌漑を実現し、省力化・水資源の効率的利用に貢献する、というシステムである(開発者:広州大学)。
②農業固形廃棄物の車両燃料転換技術
これは農業固形廃棄物を車両燃料に転換する技術である。CNC超音速蒸気爆発前処理という技術を用いて、さまざまな農業固形廃棄物(トウモロコシ・小麦などの茎や穂軸、農産物加工廃棄物など)を原料に農業固形廃棄物を車両燃料ガスに変換するものである。この方法により、主成分がメタン含有量93%以上のガス燃料を作り出す技術である(開発者:河南省農業機械試験および評価ステーション)。
③マルチフィルム回収技術
この技術は、中国でも問題になっているマルチングフィルム回収機に関するものである。システムとして、フレーム、ガイドリミット機構、フィルム保持機構、フィルム搬送機構、不純物回収プレート、フィルム回収機能を持っている。
またマルチフィルム搬送機構を装備、マルチフィルム搬送機器の底部には不純物収集プレートを設けている(開発者:湖北省疆拓科技有限责任公司)。
2、人工知能農業ロボット開発者と特許権の全容
次に、人工知能農業ロボット改良に関する特許権の内容を概観しよう。
(1)全体的傾向
表1は知識産権局特許権公告から人口知能農業ロボット関係だけをピックアップして、その開発者と具体的な内容をまとめたものである。
表1 人工知能農業ロボットの用途別特許権内訳(2021年4月更新)

(※表をクリックすると、ポップアップで拡大表示されます。)
まず開発者であるが大学、企業、個人の順に多い。個人の中には、企業や大学の一員として開発を行い、特許権申請名義が個人である場合もある。開発者権利を尊重した場合であろう。しかし開発された農業ロボットの内容に、開発者による差のようなものは確認できない。
具体的な内容であるが、図で見たような用途ごとに分類できるほどの傾向はなく、ほぼ全分野に及んでいるといえる。いくつかピックアップしてみよう。
①(モノのインターネットに基づくオレンジ剪定人工知能ロボット、①~③は表1に赤字で記載)はオレンジ樹木の枝を剪定するロボットだが、似たような小枝が錯綜する中から剪定対象を選び、切り落とす作業をロボットが実行するものである。非常に高度な技術を擁するトマトやイチゴの収穫ロボット並みの能力が必要である。
①をやや詳しく説明する。これは柑橘類の枝を剪定するためのモノのインターネットに基づき、車体、剪定装置、視覚認識装置および制御システムを含む。視覚認識装置は古い枝を見つけ、三眼カメラは樹木の写真を撮り枝の空間位置情報を制御システムに送信。レーザー測定装置は、枝のサイズを測定し認識モジュールに送信。認識モジュールは、三眼カメラおよびレーザー測定機器によって取得された枝のデータを処理、小枝の新旧情報を識別する。その後、情報パラメータ制御システムに送信され、剪定装置を駆動させ、カメラ範囲内の成熟した新芽をトリミングする。
②(山岳農業ロボットのボディレベリング用遠隔制御システム)は作業を行うボディを地平線に対して常に平行を保つ機能を備えるが、着地面が斜面であるだけに、垂直感覚機能に対する平行化機能の連動機能が必要である。
②は遠隔制御パネル、信号送信モジュール、信号受信モジュール、実行モジュールを含む遠隔制御システムである。リモートコントロールパネルからロボットの動きの制御信号を送る。信号は、リモートコントロール回路によってエンコードされた信号を生成し、山岳農業ロボットのワイヤレス受信機に送信、符号化された信号は中央処理装置に戻り処理される。その後、中央処理装置が対応する制御コマンドを生成、実行モジュールを制御、対応するレベリングアクションを実行する。
③(レーザー除草ロボット)は除草剤フリーの効果が大きく、併せて作業効率の向上が期待されるものである。
③の構造面・機能面を説明すると、自律移動式トロリー、横動機構、レーザー除草装置と制御システムで構成。メインビジョンシステムが前方情報を検出、自律移動車が作物の方向に沿って移動するように誘導する。同時に、ビジョンシステムと制御システムから草を認識して位置を特定する。草の位置情報に応じて自律移動車を制御する作物列の方向に沿って前進する間、作物列の垂直方向への集束レンズが横方向に動く時は横方向移動装置によって制御される。レーザー光線が草に正確に焦点を合わせ、草がレーザーの熱効果によって切断あるいは焼却される。一連の動作は正確かつ迅速で、列間や作物の苗の周りの除草に適している。作物の苗の損傷率は大幅に減少し、エネルギー消費量は少なく汎用性も高い。
(2)無人運転トラクター
図で示したように、耕運用機械関係の技術開発は播種・収穫に比べやや少ないが、無人運転トラクターに絞って、中国で取り組まれている主な技術開発の内容を概観しておきたい。
日本製にも言えることだが、完全な無人運転トラクターはまだ完成していない。一列の作業が畔の間近で終わり、一回転すべき具体的な地点の認識・畔近くの未耕運箇所の耕運など細かな判断となると、パソコンを通じた遠隔操作を払拭できるレベルではない。
表2には、無人運転トラクターのレベル向上のための細かな操作に関する技術開発が並んでいる。このなかには、名実ともに正確な無人運転トラクター作業(耕運・田植え・穀物収穫など)を実現する技術が含まれる。
| 出所:表1に同じ。 | |
| 1 | 無人トラクターの現場作業経路を計画するための方法と装置 |
| 2 | 高効率で正確な操作が可能な無人トラクター |
| 3 | 無人トラクターに基づくデータ監視システム |
| 4 | 無人トラクター用の自動ナビゲーションおよびステアリングシステム |
| 5 | 無人トラクターの多方弁用電気制御システム |
| 6 | 無人トラクター電気制御多方弁とその制御方法 |
| 7 | 無人トラクター用GPS測位装置 |
| 8 | 無人トラクター制御システムと制御方法 |
| 9 | 無人トラクター用遠隔監視装置 |
| 10 | 無人トラクター用データレコーダー |
| 11 | 無人トラクター用信号受信装置 |
| 12 | ブルートゥースに基づく無人トラクターリモートコントロールシステム |
| 13 | 無人トラクター協調運転間隔制御装置と制御方法 |
| 14 | 正確に制御できる無人トラクター自動変速機ユニバーサル装置 |
| 15 | 無人トラクターの自動ギアシフト用ユニバーサルデバイス |
| 16 | 大規模無人トラクター用アンテナ |
| 17 | 大規模無人トラクター用放射水タンク |
| 18 | 新型大型無人トラクター |
| 19 | 大型無人トラクターディスプレイ |
| 20 | 大型無人トラクター操作装置 |
| 21 | 無人トラクター用一般操舵装置と自動モード切り替え方式 |
| 22 | トラクターのギアボックスのギアシフト装置 |
| 23 | トラクターの操舵角を自律的にナビゲートするためのワイヤレス測定システムと方法 |
| 24 | ブロックを掻き集め,壊せる無人トラクター |
そのうちの一つは、GPSによるトラクターの位置決め自動操作である。これは、アメリカの測位システムGPSより精度が高いとされる「北斗」を利用するもので、アプリにあらかじめインプットした圃場図面上を正確に移動しながら作業ができる。道路次第では農地の区画間移動はもちろん、トラクターが自力で帰宅することも可能なシステムである。
これがトラクターに実装されると、人による前述の操作が削減される可能性がある。
もう一つは、トラクターの上空にドローンを飛ばす方法である。中国はドローン技術がハード・ソフトともに発展しているが、そのアドバンテージを使ったものともいえる。
しかしこのままでは人による遠隔操作と実質的に同じだが、パソコンのモニター上の図面に沿って移動するように操作する方法よりも実際の圃場を見ながら操作するので、正確かつ細かく作業できる点では優れている。
最後に、中国清華大学天津ハイエンド機器研究所洛陽先端製造業研究開発拠点が造った無人運転トラクターの例(動画リンク )を紹介しよう。このトラクターは、電動車で一回当たり6~7時間充電し3ヘクタール以上の作業が可能、100馬力、重量6トン、長さ4.5メートル、幅2.4メートル、高さ2メートル、4輪駆動・4輪同方向転回、5Gネット受信の最新鋭トラクターである。
市場への投入は価格面などになお課題があり、やや先になる見通しという。